
张丹院士:无人机如何变成具身智能机器人 在海上稳稳降落
12月14-15日,"2024网易未来大会"在杭州举行,主题为“看智能,见未来”。本次大会由网易公司主办,杭州市经济和信息化局(杭州市数字经济局)、杭州市商务局、杭州高新技术产业开发区管委会指导。大会包括人工智能论坛、智能汽车论坛、出海论坛等,众多科学家、企业家、创业者、投资人和行业精英人士汇聚,分享当下最热门的人工智能趋势,智能汽车未来和中国企业出海方法论,在思想碰撞中捕捉全新的时代机遇。
加拿大工程院院士、香港理工大学(南京)技术创新研究院院长、香港理工大学机器人与自动化讲座教授张丹发表演讲,演讲主题是“在多功能空中操作机器人中实现具身智能”。张丹在“网易未来大会”上详细介绍了其团队在多功能空中操作机器人领域的最新研究成果,特别是在实现具身智能方面取得的进展。该研究聚焦于并联机器人与无人机的结合,旨在解决海上旋翼无人机在动态甲板降落时的安全问题。张丹从研究背景、空中机器人结构、具身智能实现自适应降落三个方面进行了阐述。
研究背景部分指出,海上无人机作业技术虽快且安全,但在海浪作用下,舰艇甲板成为动态斜坡,导致降落风险增加。目前,专用的自主起降系统成本高昂,不适合中小型无人机。因此,研究团队致力于开发一种自适应起落架,能在各种地形上实现平稳降落。
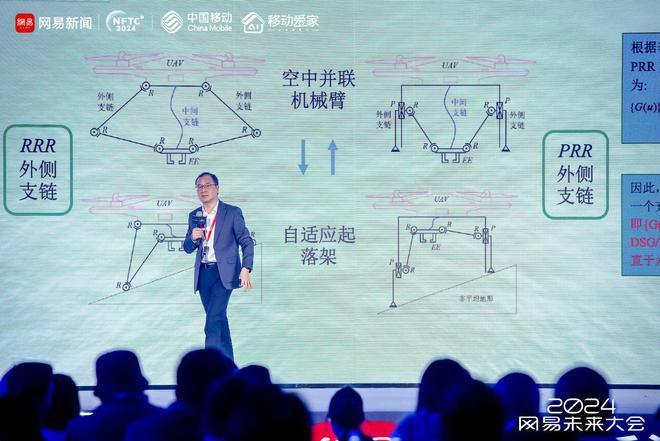
在空中机器人结构方面,张丹介绍了并联和串联两种空中抓手的设计,并提出了一种新型“广义并联机器人”,它结合了物体结构和具身智能,能在不同场景下实现自适应降落和抓取。这种机器人突破了传统并联机器人的限制,通过增加工作空间和刚度,提高了灵活性和减轻了重量。
在具身智能实现自适应降落方面,张丹展示了如何将动力学模型应用于机器人,通过质量弹簧和阻尼系统结构进行刚度曲面测试,以消除反弹情况。此外,团队还开发了三抓手和四抓手结构,利用AI技术调整角度和长度,确保降落水平。通过深度学习和强化学习模型,机器人能够识别非结构化地形并优化控制算法,增强抗干扰和平衡性能。
实验测试显示,该机器人能在60度斜坡、10厘米台阶和杂乱无章的地面上实现平稳降落。张丹还提到了水陆空三栖机器人的应用前景,这种机器人在地面行走、空中飞行和潜水方面都具有潜力,尤其在救援领域。